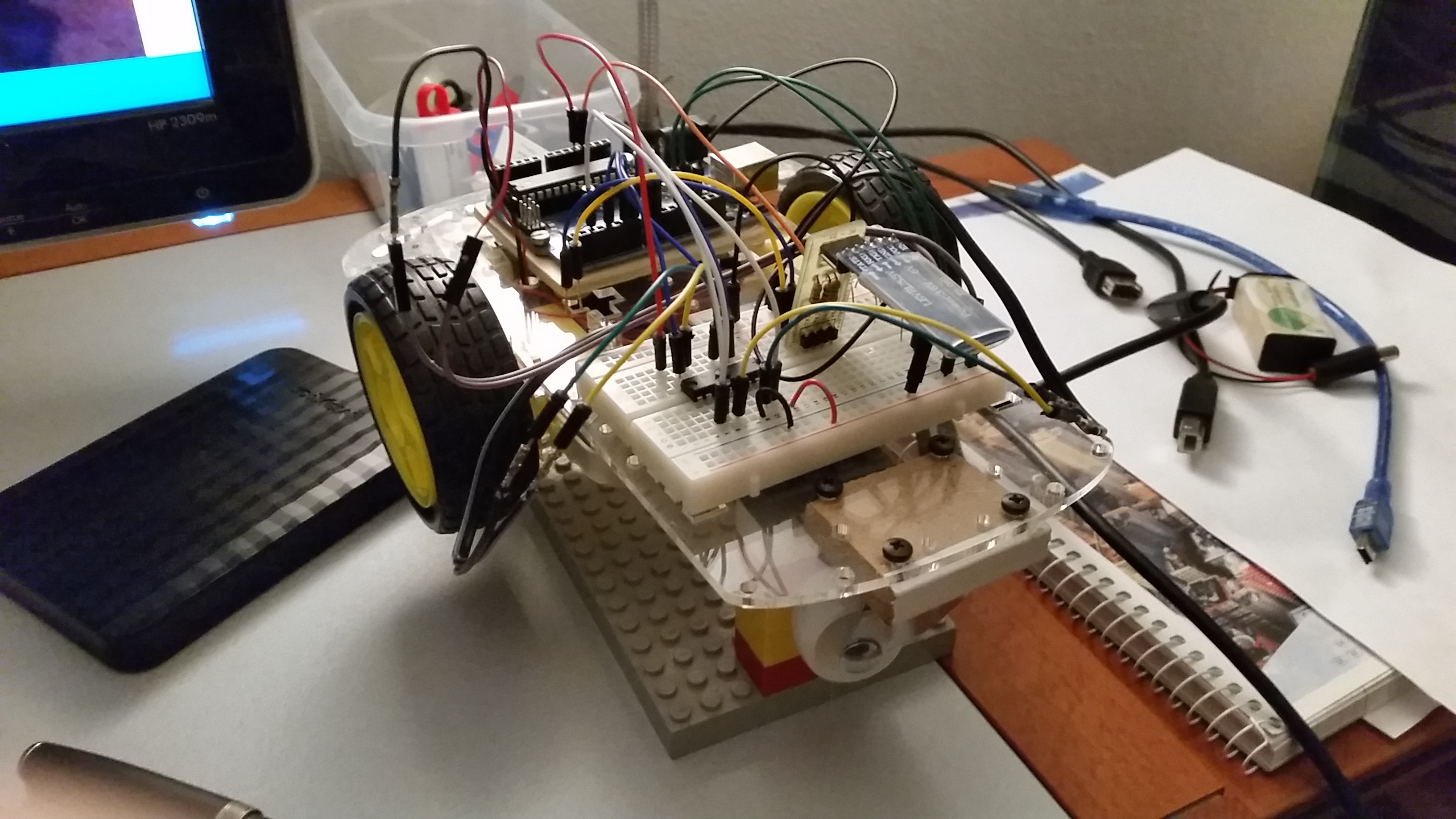
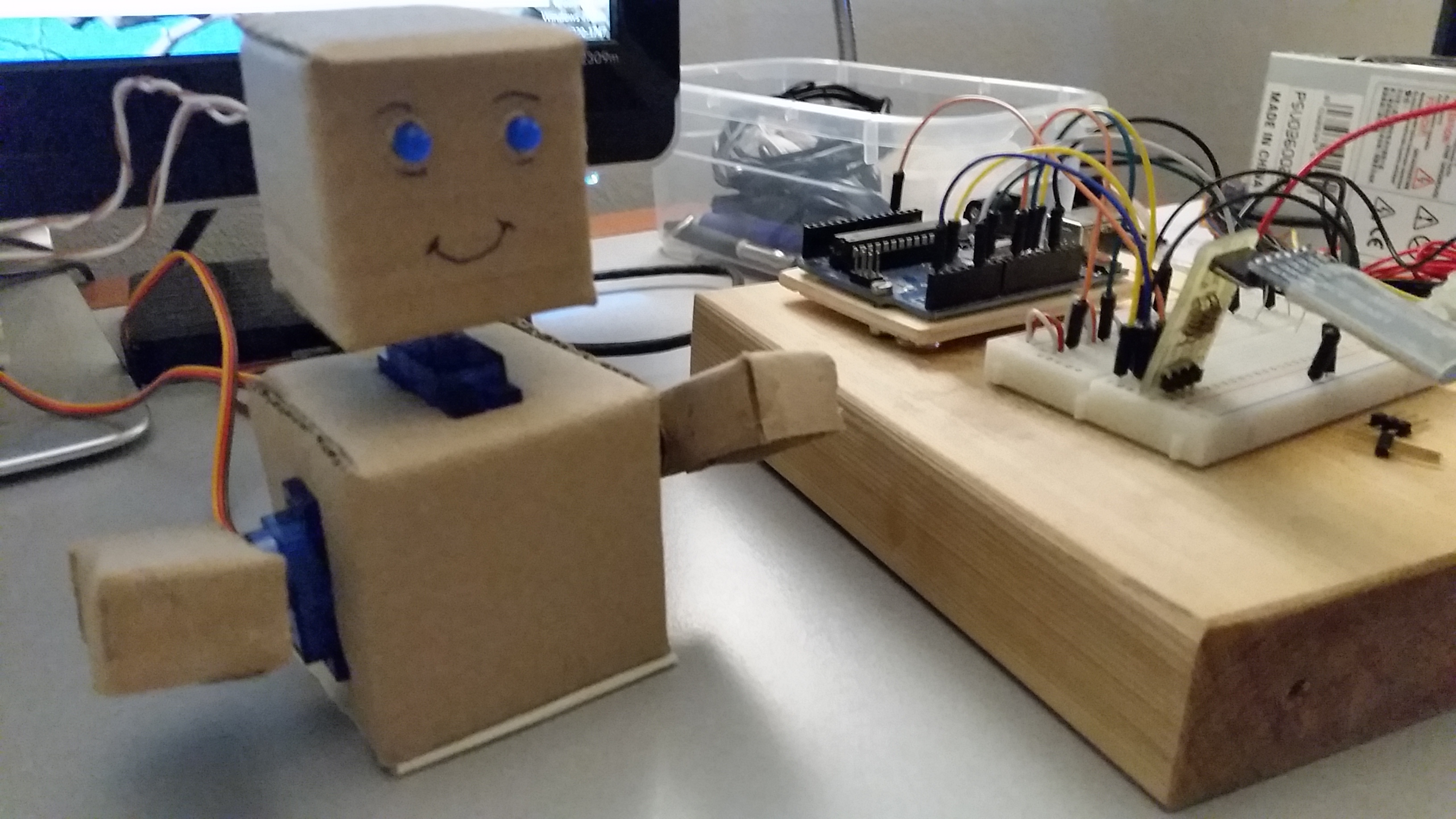
Ovduino
Robottino comandato da arduino tramite telecomando infrarossi e Nunchuck Wii rotto
Cosa serve:
- Arduino Uno
- Breadboard
- Cavetti
- Servomotore
- Led ...
- Telecomando IR
- Nunchuck Wii
Downolad:
Codice sorgente:
/*
Ovduino - ZappocoS - 3/03/2014
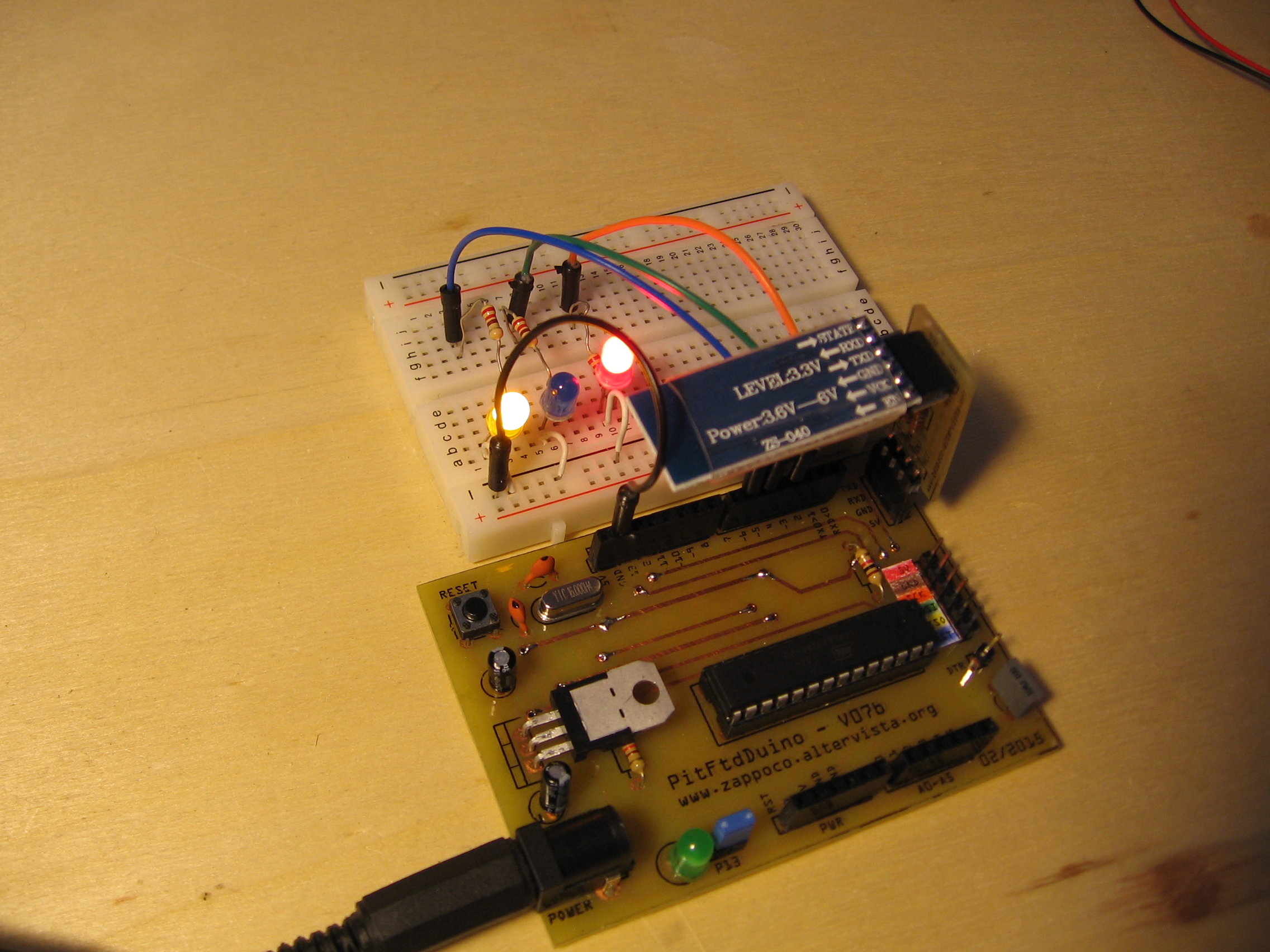
cavo giallo pin 5 - occhi - led bicolore
cavo verde pin 6 - occhi - led bicolore
cavo arancio pin 7 - bocca - led giallo
cavo blu pin 9 - servomotore testa
cavo bianco pin 11 - controllo infrarossi - segnale
*/
// Nunchuck
#include <Wire.h>
#include <ArduinoNunchuk.h>
ArduinoNunchuk nunchuk = ArduinoNunchuk();
#include "IRremote.h"
#include <Servo.h>
uint8_t buf[6]; // buffer for the six-bytes packet coming from Nunchuck
int cnt=0; // count of bytes in the buffer
int readcnt=0; // number of times we read a packet from Nunchuck
int ledPin=13; // which pin will host the blinking LED
boolean StsDummy = false;
Servo myServo;
int receiver = 11; // pin 1 of IR receiver to Arduino digital pin 11
int pinBocca = 7; // Led Bocca
int pinForward = 5; // Avanti
int pinStop = 6; // Indietro
int pinTesta = 9; // Servocomando
boolean stsTelecomando = false;
boolean stspinBocca = false;
boolean stspinForward = false;
boolean stspinStop = false;
boolean stspinLeft = false;
boolean stspinRight = false;
int stepAngle = 10;
int AngTesta;
int AngMin = -90;
int AngMax = 90;
//int ServoMin = 0;
//int ServoMax = 179;
int ServoMin = 60;
int ServoMax = 119;
int Angle = (AngMin + AngMax)/2 ;
/*-----( Declare objects )-----*/
IRrecv irrecv(receiver); // create instance of 'irrecv'
decode_results results; // create instance of 'decode_results'
void setup()
{
Serial.begin(19200);
// Nunchuck
nunchuk.init();
//nunchuck_init();
Serial.println("Test per controllo Robot OvoDuino");
Serial.println("marzo 2014");
irrecv.enableIRIn(); // Start the receiver
myServo.attach(pinTesta);
pinMode (pinBocca, OUTPUT);
pinMode (pinForward, OUTPUT);
pinMode (pinStop, OUTPUT);
}
void loop()
{
// Controllo infrarossi
if (irrecv.decode(&results)) // have we received an IR signal?
{
// Serial.println(results.value, HEX); //UN Comment to see raw values
translateIR();
irrecv.resume(); // receive the next value
}
// Controllo Nunchuck
else {
//nunchuk.update(); // Utilizzo libreria
nunchuck_update ();
}
// esegue operazioni in funzione degli eventi
if(stspinBocca == true) {
digitalWrite (pinBocca, HIGH);
}
else
{
digitalWrite (pinBocca, LOW);
}
if(stspinForward == true) {
digitalWrite (pinForward, HIGH);
}
else
{
digitalWrite (pinForward, LOW);
}
if(stspinStop == true) {
digitalWrite (pinStop, HIGH);
}
else
{
digitalWrite (pinStop, LOW);
}
ControlloTesta ();
}
/*-----( Declare User-written Functions )-----*/
//
// Reset dello stato delle variabili
//
void ResetOriginaValue()
{
stspinBocca = false;
stspinForward = false;
stspinStop = false;
stspinLeft = false;
stspinRight = false;
Angle = (AngMin + AngMax)/2 ;
stepAngle = 10;
}
//
// Controllo funzioni della testa OvDuino
//
void ControlloTesta()
{
if(stspinLeft == true) {
Angle = Angle + stepAngle;
stspinLeft = false;
}
if(stspinRight == true) {
Angle = Angle - stepAngle;
stspinRight = false;
}
if (Angle < AngMin) {
Angle = AngMin;
}
if (Angle > AngMax) {
Angle = AngMax;
}
Serial.print(" Angle ");
Serial.println( Angle);
AngTesta = map(Angle, AngMin, AngMax, ServoMin, ServoMax);
myServo.write(AngTesta);
}
void translateIR() // takes action based on IR code received
// describing KEYES Remote IR codes
{
switch(results.value)
{
case 0xFF629D: Serial.println(" FORWARD");
stspinForward = !stspinForward;
break;
case 0xFF22DD: Serial.println(" LEFT");
stspinLeft = true;
break;
case 0xFF02FD: Serial.println(" -OK-");
stspinBocca = !stspinBocca;
break;
case 0xFFC23D: Serial.println(" RIGHT");
stspinRight = true;
break;
case 0xFFA857: Serial.println(" REVERSE");
stspinStop = !stspinStop;
break;
case 0xFF6897: Serial.println(" 1");
stspinForward = !stspinForward;
stspinLeft = true;
break;
case 0xFF9867: Serial.println(" 2"); break;
case 0xFFB04F: Serial.println(" 3");
stspinForward = !stspinForward;
stspinRight = true;
break;
case 0xFF30CF: Serial.println(" 4");
stspinLeft = true;
break;
case 0xFF18E7: Serial.println(" 5"); break;
case 0xFF7A85: Serial.println(" 6");
stspinRight = true;
break;
case 0xFF10EF: Serial.println(" 7");
stspinStop = !stspinStop;
stspinLeft = true;
break;
case 0xFF38C7: Serial.println(" 8"); break;
case 0xFF5AA5: Serial.println(" 9");
stspinStop = !stspinStop;
stspinRight = true;
break;
case 0xFF42BD: Serial.println(" *");
stepAngle = stepAngle * 2;
if (stepAngle > 45) {
stepAngle = 45;
}
break;
case 0xFF4AB5: Serial.println(" 0");
ResetOriginaValue();
break;
case 0xFF52AD: Serial.println(" #");
stepAngle = stepAngle / 2;
if (stepAngle < 2) {
stepAngle = 2;
}
break;
case 0xFFFFFFFF: Serial.println(" REPEAT");break;
default:
Serial.println(" other button ");
}// End Case
//delay(100); // Do not get immediate repeat
} //END translateIR
// ---------------------------------------------------
//
// Nunchuck
//
// ---------------------------------------------------
uint8_t nunchuk_decode(uint8_t x) // decode nunchuck data
{
return (x^0x17)+0x17; // not that an hard encryption...
}
/*
void nunchuck_init() // inizializzazione
{
int n;
for(n=0; n<6; n++) buf[n]=0; // fill buffer with zero values
Wire.begin(); // TWI init
Wire.beginTransmission(0x52); // nunchuck init
Wire.write(0x55);
Wire.write(0xF0);
Wire.endTransmission();
Wire.beginTransmission(0x52); // nunchuck init
Wire.write(0x00);
Wire.write(0xFB);
Wire.endTransmission();
}
*/
void nunchuck_update() // inizializzazione
{
Wire.requestFrom(0x52, 6); // request data from nunchuck
while(Wire.available()) // read data and light the LED
{
buf[cnt++] = nunchuk_decode(Wire.read());
}
//if(cnt>=6) // an entire Nunchuck packet was read?
//{
// nunchuckprintdata(); // yes, print it
cnt=0; // clear buffer counter
nunchuck_ack(); // acknowledge received packet
// tasto C
StsDummy = buf[5]&2 ? false : true;
if ( StsDummy == true){
stspinBocca = !stspinBocca;
}
// tasto z
StsDummy = buf[5]&1 ? false : true;
if ( StsDummy == true){
ResetOriginaValue();
}
// Avanti
if (((int)buf[1]-131) > 20){
stspinForward = !stspinForward;
stspinStop = false;
}
// Indietro
else if (((int)buf[1]-131) < -20){
stspinForward = false;
stspinStop = !stspinStop;
}
// Right
if (((int)buf[0]-167) > 20){
stspinRight = true;
}
// Left
if (((int)buf[0]-167) < -20){
stspinLeft = true;
}
//}
}
void nunchuck_ack() // acknowledge a Nunchuck packet
{
Wire.beginTransmission(0x52); // send a zero to device 0x52
Wire.write(0);
Wire.endTransmission();
}
void nunchuckprintdata() // print out the values
{
int n; // note: the 123,131,524,597... depend on my Nunchuck calibration
Serial.print(++readcnt, DEC);
Serial.print("\t"); // joystick x/y values
Serial.print((int)buf[0]-123);
Serial.print("\t");
Serial.print((int)buf[1]-131);
n=(buf[2]<<2)+((buf[5]>>2)&3)-524; // accel X
Serial.print("\t");
Serial.print(n);
n=(buf[3]<<2)+((buf[5]>>4)&3)-597; // accel Y
Serial.print("\t");
Serial.print(n);
n=(buf[4]<<2)+((buf[5]>>6)&3)-668; // accel Z
Serial.print("\t");
Serial.print(n);
Serial.print(buf[5]&1 ? "\t- " : "\t[z] ");
Serial.print(buf[5]&2 ? "-" : "[c]");
// Serial.print(buf[5]);
Serial.print ("\r\n");
}
/* ( THE END ) */
ZappocoJ, marzo 2014