PitCnD
PitCnD, dopo PitAlarmBot - Pit Check aNd Do.
Partendo da PitAlarmBot, PitCnD PitAlarm è un sistema integrato di controllo (Check) e in funzione di determinati eventi di azione (Do). In pratica sitentizza in un unico codice personalizzabile attraverso la programmazione condizionale alcuni precedenti software.
| Check | Do | Funzione |
| Orario e presenza h2o | messaggio e chiusura contatto (rele) | PitOrto - irrigazione orto sul balcone |
| presenza sensore di PIR | messaggio | PitAlarm - messaggio allarme presenza |
| Sensore Reed | messaggio | PitAlarm - allarme apertura/chiusura (apertura porta/livello h2o/ecc) |
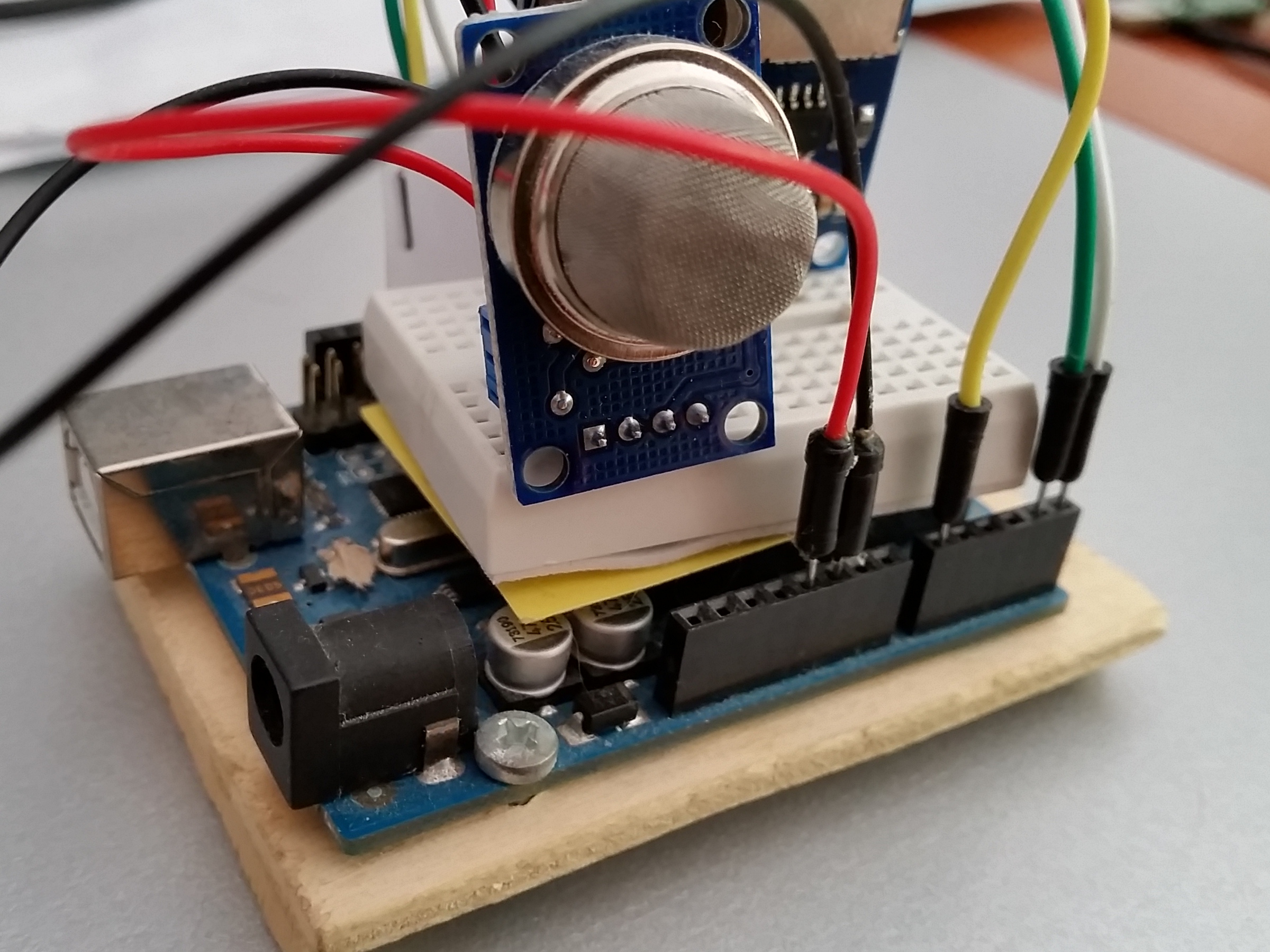
| livello rilevazione sensore | messaggio | PitMqSensor - allarme soglia superata (fuga di gas) |
| distanza | messaggio | PitDist - messaggio di distanza soglia superata (oggetto troppo vicino/lontano) |
Codice sorgente:
Zappoco - PitCnD21_01_1D 31/01/2021 -- taratura sensore serie MQ - prova con MQ04 - metano
Zappoco - PitCnD21_01_1C 30/01/2021 -- prima integrazione PitOrto - funzionamento giornaliero
Zappoco - PitCnD20_08_1B 29/08/2020 -- integrazione sensore ultrasuoni
Zappoco - PitCnD20_08_1A 28/08/2020 -- integrazione sensore PIR
Zappoco - PitCnD20_08_19 21/08/2020 -- integrazione sensore di fumo o simile
PitCnD --> Stazione di controllo Check and Do del PIT
www.zappoco.altervista.org
Evoluzione di PitAlarm e integrazione di PitPump
Check Do Tag Pin Scheda
---------------------------------------------------------------
Orario --> Pompaggio --> OnPitPump --> D1 D2
Dist --> Allarme --> OnPitDist --> not jet implemented
Pir --> Allarme --> OnPitPir --> D5
Reed --> Allarme --> OnPitReed --> D1
Sensore (soglia) --> Allarme --> OnPitMQSensor --> A0
---------------------------------------------
---------------------------------------------
Pinout per WEMOS D1 mini
---------------------------------------------
Pin Sheda Pin IDE
(GPIONN)
D4 ------------ 2
D3 ------------ 0
D2 ------------ 4
D1 ------------ 5
D0 ------------ 16
D5 ------------ 14
D6 ------------ 12
D7 ------------ 13
D8 ------------ 15
RX ------------ 03
TX ------------ 01
---------------------------------------------
*/
#define PitProgramVersion "PitCnD_V21_01_1D - by Zappoco"
//----------------------------------------------------------------------------------------
// Weblogger
//----------------------------------------------------------------------------------------
#define TE_ST_01 //Profilo TEST completo -- PitCnD_V21_01_1D - by Zappoco
//----------------------------------------------------------------------------------------
// Fine settaggio
//----------------------------------------------------------------------------------------
//Profilo di test
#ifdef TE_ST_01
#define PitLocation_DEF "MRGB" //nome della location
#define PitStation_DEF "AL01" //nome della stazione
#define PitSubject_DEF " --> stazione di TEST inizializzata correttamente";
//----------------------------------------------------------------------------------------
//Impostazioni PitPir
//----------------------------------------------------------------------------------------
//#define OnPitPir //2021030 --> ok verificato
#ifdef OnPitPir
#define PitPirBody_DEF " allarme sensore PIR"
#endif
//----------------------------------------------------------------------------------------
//Impostazioni PitReed
//----------------------------------------------------------------------------------------
#define OnPitReed //2021030 --> ok verificato
#ifdef OnPitReed
//#define OnPitReedOpen // invia l'allarme se aperto anzichè se chiuso
#ifdef OnPitReedOpen
#define PitReedBody_DEF " allarme apertura contatto reed"
#else
#define PitReedBody_DEF " allarme chiusura contatto reed"
#endif
#endif
//----------------------------------------------------------------------------------------
//Impostazioni PitPump
//----------------------------------------------------------------------------------------
//#define OnPitPump //2021030 --> ok verificato
#ifdef OnPitPump
#define pumpOrario 20 // Ora in cui viene accesa la pompa
#define pumpDurata 30000 // durata del pompaggio
#define PitPumpBody_DEF " pompaggio completato correttamente"
#define PitPumpBody_DNO " livello H2O insufficiente"
#endif
//----------------------------------------------------------------------------------------
//Impostazioni PitMQSensor
//----------------------------------------------------------------------------------------
//#define OnPitMQSensor //2021030 --> ok verificato
#ifdef OnPitMQSensor
#define MQsensorLevel 450 // livello di allarme
//#define MQsensorLE // minore o uguale
#define MQsensorGE // maggiore o uguale
#define PitMQSensorBody_DEF " MQ04 - Allarme Metano Soggiorno"
#endif
#define OnReset // Attiva il reset
#define Router
#define OnWebLogger
#define OnTelegramBotSend
#define TimeNTP
#define OnSerial // stampa sulla seriale
#define OnDebug // accorcia i tempi
//#define OnPiuDebug // stampa maggiori dettagli sulla seriale
#endif
#ifdef OnWebLogger
#include "Arduino.h" //HTTP
#endif
#include "ESP8266WiFi.h"
#ifdef OnWebLogger
#include "ESP8266WiFiMulti.h"
#include "ESP8266HTTPClient.h"
#include "WiFiClient.h"
ESP8266WiFiMulti WiFiMulti;
#endif
#ifdef OnTelegramBotSend
#include "WiFiClientSecure.h"
// ----------------------------
// Additional Libraries - each one of these will need to be installed.
// ----------------------------
#include "UniversalTelegramBot.h"
#include "ArduinoJson.h"
// Search for "Arduino Json" in the Arduino Library manager
// https://github.com/bblanchon/ArduinoJson
#endif
#define PitAlarmMyHostUrl_DEF "http://www.fdt.altervista.org"
#ifdef Router
#define MySsid "MySsid"
#define MyPassword "MyPassword"
#endif
// Initialize Wifi connection to the router
char ssid[] = MySsid; // your network SSID (name)
char password[] = MyPassword; // your network key
#ifdef OnTelegramBotSend
// Use @myidbot to find out the chat ID of an individual or a group
// Also note that you need to click "start" on a bot before it can
// message you
#define CHAT_ID "12345678"
// Initialize Telegram BOT
#define BOTtoken "XXXXXXXXX:XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX" // your Bot Token (Get from Botfather)
WiFiClientSecure BOTclient;
UniversalTelegramBot bot(BOTtoken, BOTclient);
#endif
#ifdef TimeNTP
#include "TimeLib.h"
#include "WiFiUdp.h"
// NTP Servers:
// IPAddress timeServer(193, 204, 114, 232); // ntp1.inrim.it --> www.inrim.it (istituto nazionale di ricerca e meteorologia)
// IPAddress timeServer(193, 204, 114, 233); // ntp2.inrim.it --> www.inrim.it (istituto nazionale di ricerca e meteorologia)
IPAddress timeServer(193, 204, 114, 105); // time.inrim.it --> www.inrim.it (istituto nazionale di ricerca e meteorologia)
//
// era definita const int
//
int timeZone = 1; // Central European Time - con ora solare
unsigned int localPort = 8888; // local port to listen for UDP packets
time_t prevDisplay = 0; // when the digital clock was displayed
WiFiUDP Udp;
time_t getNtpTime();
// unsigned int localPort = 8888; // local port to listen for UDP packets
#endif
//----------------------------------------------------------------------------------------
// Fine impostazioni
//----------------------------------------------------------------------------------------
#ifdef OnDebug
#define intTime 20000 // setta a 1 minuto (60000 millisecondi) l'intervallo tra gli allarmi (timedelay)
#define intReset 5 // setta a 5 le volte per il ritardo reset
#else
#define intTime 300000 // setta a 5 minuti (300000 millisecondi) l'intervallo tra gli allarmi (timedelay)
#define intReset 72 // setta a 72 le volte per il ritardo reset --> 6 ore
#endif
#if defined(PitAlarmMyHostUrl_DEF)
String PitAlarmMyHost = PitAlarmMyHostUrl_DEF;
#endif
#if defined(PitLocation_DEF)
String PitAlarmSub = PitLocation_DEF;
#else
String PitAlarmSub = "dati";
#endif
#if defined(PitStation_DEF)
String PitSt = PitStation_DEF;
#else
String PitSt = "";
#endif
String PitAlarmDir = "/Z_PitAlarm/";
String Subject = PitProgramVersion;
#ifdef OnPitPir
String BodyPir = PitAlarmSub + " " + PitSt + ": " + PitPirBody_DEF;
#endif
#ifdef OnPitReed
String BodyReed = PitAlarmSub + " " + PitSt + ": " + PitReedBody_DEF;
#endif
#ifdef OnPitPump
String BodyOrto = PitAlarmSub + " " + PitSt + ": " + PitPumpBody_DEF;
String BodyOrNO = PitAlarmSub + " " + PitSt + ": " + PitPumpBody_DNO;
#endif
#ifdef OnPitMQSensor
String BodyMQSensor = PitAlarmSub + " " + PitSt + ": " + PitMQSensorBody_DEF;
#endif
//----------------------------------------------------------------------------------------
// Variabili controllo allarmi
//----------------------------------------------------------------------------------------
boolean FlagSended = false; // Flag di allarme inviato
boolean FlagAllarmeReed = false; // Flag di allarme rilevato
boolean FlagAllarmePir = false; // Flag di allarme rilevato
//----------------------------------------------------------------------------------------
// Variabili temporali
//----------------------------------------------------------------------------------------
unsigned long TimeDelay = intTime;
unsigned long TimeReset = intReset * intTime;
unsigned long TimeStart = 0; // tempo di partenza
unsigned long TimeUltima = 0; // tempo ultima lettura
unsigned long TimeAdesso = 0; // tempo della lettura
long TimeDelta = 0; // differenza
unsigned long tempo;
// ---------------------------------------------------
// Variabili controllo PitPir su D1 Mini - Pin D5 --> GPIO 14
// ---------------------------------------------------
#ifdef OnPitPir
int pirPin = 14;
int pirVal ;
#endif
// ---------------------------------------------------
// Variabili controllo PitReed su D1 Mini - Pin D1 --> GPIO 5
// ---------------------------------------------------
#ifdef OnPitReed
int reedPin = 5;
int reedVal ;
#endif
// ---------------------------------------------------
// Variabili controllo PitPump su D1 Mini
// Pin D2 --> GPIO 4 --> sensore H2O
// Pin D1 --> GPIO 5 --> relais
// ---------------------------------------------------
#ifdef OnPitPump
const int h2oSensorPin = 4; //pin collegamento livello H2O D2 - GPIO4
int liquidSensorVal;
int pumpPin = 5; //pin collegamento pompa D1 - GPIO5
int pumpHour = pumpOrario; //ora in cui viene accesa la pompa
unsigned long pumpDelay = pumpDurata; //durata del pompaggio
boolean pumpFlag = false; //Flag pompaggio
#endif
unsigned long Counter = 0; // contatore delle letture
// ---------------------------------------------------
// Variabili controllo PitMQSensor
// ---------------------------------------------------
#ifdef OnPitMQSensor
int smokeA0 = A0;
// Your threshold value
int sensorThres = MQsensorLevel;
boolean analogSensorFlag;
#endif
void setup() {
#ifdef OnSerial
Serial.begin(9600);
#endif
#ifdef OnSerial
// Serial.println(Arduino);
Serial.println("");
Serial.println("");
Serial.println(PitProgramVersion);
Serial.println("---------------------------");
#ifdef OnPiuDebug
Serial.print (" OnPitPir is ");
#ifdef OnPitPir
Serial.println("on");
#else
Serial.println("off");
#endif
Serial.print (" OnPitReed is ");
#ifdef OnPitReed
Serial.println("on");
#else
Serial.println("off");
#endif
Serial.print (" OnPitReedOpen is ");
#ifdef OnPitReedOpen
Serial.println("on");
#else
Serial.println("off");
#endif
Serial.print (" OnPitPump is ");
#ifdef OnPitPump
Serial.println("on");
#else
Serial.println("off");
#endif
Serial.print (" OnPitMQSensor is ");
#ifdef OnPitMQSensor
Serial.println("on");
Serial.print (" MQsensorLevel is "); Serial.print (sensorThres);
#ifdef MQsensorLE
Serial.println(" LE --> minore o uguale");
#endif
#ifdef MQsensorGE
Serial.println(" GE --> maggiore o uguale");
#endif
#else
Serial.println("off");
#endif
Serial.print (" OnDebug is ");
#ifdef OnDebug
Serial.println("on");
#else
Serial.println("off");
#endif
Serial.print (" OnPiuDebug is ");
#ifdef OnPiuDebug
Serial.println("on");
#else
Serial.println("off");
#endif
#ifdef TimeNTP
Serial.println(" TimeNTP is on");
Serial.print (" TimeZone is "); Serial.println(timeZone);
#endif
Serial.println("---------------------------");
#endif
#endif
Subject = Subject + " - " + PitAlarmSub + " " + PitSt + PitSubject_DEF ;
#ifdef OnTelegramBotSend
// This is the simplest way of getting this working
// if you are passing sensitive information, or controlling
// something important, please either use certStore or at
// least client.setFingerPrint
BOTclient.setInsecure();
#endif
// Set WiFi to station mode and disconnect from an AP if it was Previously
// connected
WiFi.mode(WIFI_STA);
WiFi.disconnect();
delay(100);
#ifdef OnSerial
// Attempt to connect to Wifi network:
Serial.print("Connecting Wifi: ");
Serial.println(ssid);
#endif
WiFi.begin(ssid, password); // commentato per linea HTTP
while (WiFi.status() != WL_CONNECTED) {
#ifdef OnSerial
Serial.print(".");
#endif
delay(500);
}
#ifdef OnSerial
Serial.println("");
Serial.println("WiFi connected");
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
#endif
#ifdef TimeNTP
// NTP Time
Udp.begin(localPort);
#ifdef OnPiDebug
#ifdef ESP8266
Serial.print(" local port: ");
Serial.print(Udp.localPort());
#endif
Serial.println(" NTP waiting for sync ... ");
#endif
setSyncProvider(getNtpTime);
setSyncInterval(300);
time_t prevDisplay = 0; // when the digital clock was displayed
//
// verifica se deve scattare ora legale o ora solare
//
// legaltime estrapolata da http://www.mauroalfieri.it/elettronica/orto-idroponico-verticale-con-arduino-quinta-parte.html
//
// attenzione nella routine di Mauro Alfieri la domenica è 0 mentre nella routine arduino la domenica è 1
//
byte cFlag = 0;
const byte iDayW = weekday();
const byte iDay = day() -1; // attenzione nella routine di mauro alfieri la domenica è 0 mentre nella routine arduino la domenica è 1
const byte iMonth= month();
const byte iHour = hour();
// ottobre
if (iMonth == 10) {
if (iDayW == 0) {
if (((iDay + 7) > 31) && (iHour >= 3)) { cFlag = 0; }
} else {
if ((iDay + (7 - iDayW))> 31) { cFlag = 0; }
else { cFlag = 1; }
}
}
// marzo
if (iMonth == 3) {
if (iDayW == 0) {
if (((iDay + 7) > 31) && (iHour >= 2)) { cFlag = 1; }
} else {
if((iDay + (7 - iDayW))> 31) { cFlag = 1; } else { cFlag = 0; }
}
}
if(iMonth >= 4 && iMonth <= 9) { cFlag = 1; }
if((iMonth >= 1 && iMonth <= 2) || (iMonth >= 11 && iMonth <= 12)) { cFlag = 0; }
// cFlag= 1; // solo per test
if (cFlag != 0){
timeZone += cFlag;
setSyncProvider(getNtpTime);
prevDisplay = now();
}
#ifdef OnPiuDebug
Serial.println(".......................................................");
Serial.println("passaggio automatico ora legale / solare");
Serial.println(".......................................................");
Serial.print("day : "); Serial.println(day());
Serial.print("month : "); Serial.println(month());
Serial.print("year : "); Serial.println(year());
// Day of the week (1-7), Sunday (domenica) is day 1 --> http://playground.arduino.cc/Code/Time
Serial.print("weekday : "); Serial.println(weekday());
Serial.print("hour : "); Serial.println(hour());
Serial.print("minute : "); Serial.println(minute());
Serial.print("second : "); Serial.println(second());
Serial.println(".......................................................");
Serial.print("cFlag : "); Serial.println(cFlag);
Serial.println(".......................................................");
Serial.print("timeZone : "); Serial.println(timeZone);
Serial.println(".......................................................");
#endif
#endif // --> #ifdef TimeNTP
PrintAlarmData (Subject);
FlagSended = false;
PrintAlarmData (PitAlarmSub + " " + PitSt + ": PitCnD --> Stazione di controllo Check and Do del PIT");
FlagSended = false;
// ---------------------------------------------------
// Inizializzazione PIN
// ---------------------------------------------------
#ifdef OnPitPir
PrintAlarmData (PitAlarmSub + " " + PitSt + ": se il sensore Pir rileva presenza (Check) invia (Do) un messaggio di allarme");
pinMode (pirPin, INPUT);
FlagSended = false;
#endif
#ifdef OnPitReed
#ifdef OnPitReedOpen
PrintAlarmData (PitAlarmSub + " " + PitSt + ": se il sensore Reed è aperto (Check) invia (Do) un messaggio di allarme");
#else
PrintAlarmData (PitAlarmSub + " " + PitSt + ": se il sensore Reed è chiuso (Check) invia (Do) un messaggio di allarme");
#endif
pinMode (reedPin, INPUT);
FlagSended = false;
#endif
#ifdef OnPitPump
//sprintf(str, "%06d", Counter)
PrintAlarmData (PitAlarmSub + " " + PitSt + ": se sono le ore " + String (pumpHour) + " e c'è acqua nel serbatoio (Check) aziona l'irrigazione (Do) per " + String(pumpDelay/1000) + " secondi");
pinMode(h2oSensorPin, INPUT);
pinMode (pumpPin, OUTPUT);
digitalWrite (pumpPin, LOW);
FlagSended = false;
#endif
#ifdef OnPitMQSensor
pinMode(smokeA0, INPUT);
#ifdef MQsensorLE
PrintAlarmData (PitAlarmSub + " " + PitSt + ": se il valore rilevato è minore di " + String(MQsensorLevel) + " (Check) invia (Do) un messaggio di allarme");
#endif
#ifdef MQsensorGE
PrintAlarmData (PitAlarmSub + " " + PitSt + ": se il valore rilevato è maggiore di " + String(MQsensorLevel) + " (Check) invia (Do) un messaggio di allarme");
#endif
FlagSended = false;
#endif
FlagSended = false;
TimeStart = millis();
TimeAdesso = TimeStart;
TimeUltima = TimeStart;
}
void loop() {
// --------------------------------------------------------
// PitPirCode - START
// --------------------------------------------------------
#ifdef OnPitPir
pirVal = digitalRead(pirPin);
if (pirVal == HIGH) {
FlagAllarmePir = true;
} else {
FlagAllarmePir = false;
}
if (FlagAllarmePir){
PrintAlarmData (BodyPir);
}
#endif
// --------------------------------------------------------
// PitPirCode - END
// --------------------------------------------------------
// --------------------------------------------------------
// PitReedCode - START
// --------------------------------------------------------
#ifdef OnPitReed
#ifdef OnPitReedOpen
reedVal = !digitalRead(reedPin);
#else
reedVal = digitalRead(reedPin);
#endif
if (reedVal == HIGH) {
FlagAllarmeReed = true;
} else {
FlagAllarmeReed = false;
}
if (FlagAllarmeReed){
PrintAlarmData (BodyReed);
}
#endif
// --------------------------------------------------------
// PitReedCode - END
// --------------------------------------------------------
// --------------------------------------------------------
// PitPumpCode - START
// --------------------------------------------------------
#ifdef OnPitPump
TimeAdesso = millis();
TimeDelta = TimeAdesso - TimeUltima - TimeDelay;
#ifdef OnPiuDebug
Serial.print("TimeAdesso:") ;Serial.println(TimeAdesso);
Serial.print("TimeUltima:") ;Serial.println(TimeUltima);
Serial.print("TimeDelta :") ;Serial.println(TimeDelta);
#endif
if (TimeDelta >= 0) {
TimeUltima = millis();
Counter++;
#ifdef TimeNTP
if (hour() == pumpHour){
#ifdef OnSerial
PrintDateTime();
Serial.print (" pumpHour = ");
Serial.print (pumpHour);
Serial.println(" --> OK e' l'ora giusta");
#endif
if (pumpFlag == false) {
#ifdef OnSerial
Serial.println(" controllo livelli per pompaggio ");
#endif
liquidSensorVal = digitalRead (h2oSensorPin);
// se non presente sensore
//liquidSensorVal = !digitalRead (h2oSensorPin);
#ifdef OnSerial
#ifdef OnPiuDebug
Serial.print ("liquidSensorVal :");
Serial.println(liquidSensorVal);
#endif
#endif
if (liquidSensorVal == HIGH) {
#ifdef OnSerial
Serial.print (" Livello H2O OK ");
#endif
digitalWrite (pumpPin, HIGH);
pumpFlag = true;
delay(pumpDelay);
digitalWrite (pumpPin, LOW);
#ifdef OnSerial
Serial.println("--> Pompaggio completato correttamente");
#endif
PrintAlarmData (BodyOrto);
} else {
pumpFlag = true;
#ifdef OnSerial
Serial.println(" Livello H2O basso: pump OFF");
#endif
PrintAlarmData (BodyOrNO);
}
digitalWrite (pumpPin, LOW);
} else {
#ifdef OnSerial
Serial.println(" pompaggio gia' eseguito");
#endif
}
} else {
#ifdef OnSerial
PrintDateTime();
Serial.print (" pumpHour = ");
Serial.print (pumpHour);
Serial.println(" --> Non e' l'ora giusta");
#endif
}
#endif
}
#endif
// --------------------------------------------------------
// PitPumpCode - END
// --------------------------------------------------------
// --------------------------------------------------------
// PitMQSensor - START
// --------------------------------------------------------
#ifdef OnPitMQSensor
TimeAdesso = millis();
TimeDelta = TimeAdesso - TimeUltima - TimeDelay;
#ifdef OnPiuDebug
Serial.print("TimeAdesso:") ;Serial.println(TimeAdesso);
Serial.print("TimeUltima:") ;Serial.println(TimeUltima);
Serial.print("TimeDelta :") ;Serial.println(TimeDelta);
#endif
if (TimeDelta >= 0) {
TimeUltima = millis();
Counter++;
int analogSensor = analogRead(smokeA0);
#ifdef OnSerial
Serial.print("Pin A0: "); Serial.print(analogSensor);
#endif
// Checks if it has reached the threshold value
#ifdef MQsensorLE // minore o uguale
analogSensorFlag = analogSensor <= sensorThres;
#endif
#ifdef MQsensorGE // maggiore o uguale
analogSensorFlag = analogSensor >= sensorThres;
#endif
if (analogSensorFlag)
{
#ifdef OnSerial
Serial.println(" --> ALARM OK");
#endif
PrintAlarmData (BodyMQSensor);
}
else
{
#ifdef OnSerial
Serial.println(" --> ALARM NO");
#endif
}
#ifdef TimeNTP
#endif
}
#endif
// --------------------------------------------------------
// PitMQSensor - END
// --------------------------------------------------------
#ifdef OnReset
TimeAdesso = millis();
TimeDelta = TimeAdesso - TimeStart - TimeReset;
if (TimeDelta >= 0) {
ESP.reset();
#ifdef OnSerial
Serial.println("Reset del sistema");
#endif
}
#endif
}
//--------------------------------------------------------------------------------------------------------------
// Questa funzione stampa i dati
//
// --> seriale
// --> WEB
// --> TelegramBOT
//--------------------------------------------------------------------------------------------------------------
void PrintAlarmData ( String PitAlarmString_S) {
TimeAdesso = millis();
TimeDelta = TimeAdesso - TimeUltima - TimeDelay;
if (TimeDelta >= 0) {
FlagSended = false;
}
String PitAlarmString_W = PitAlarmString_S;
PitAlarmString_W.replace(" ", "_");
#ifdef TimeNTP
// NTP Time
prevDisplay = now();
#ifdef OnSerial
PrintDateTime();
#endif
#endif
#ifdef OnSerial
Serial.print (PitAlarmString_S);
#endif
#ifdef OnTelegramBotSend
if (!FlagSended ){
#ifdef OnSerial
Serial.print(" : [TBOT] send ok");
#endif
bot.sendMessage(CHAT_ID, PitAlarmString_S, "");
PitAlarmString_W = PitAlarmString_W + "_[TBOT]_send_ok" ;
FlagSended = true;
TimeUltima = millis();
} else{
#ifdef OnSerial
Serial.print(" : [TBOT] send no");
#endif
}
#endif
String PitAlarmUrl = PitAlarmMyHost + PitAlarmDir + "PIT_write_logs.php?P1=" + PitAlarmSub + "/" + PitSt + "&dato=" + PitAlarmString_W;
#ifdef OnSerial
#ifdef OnPiuDebug
Serial.print ("url: ");
Serial.println (PitAlarmUrl);
#endif
#endif
#ifdef OnWebLogger
// wait for WiFi connection
if ((WiFiMulti.run() == WL_CONNECTED)) {
WiFiClient httpClient;
HTTPClient httpServer;
#ifdef OnSerial
Serial.print(" : [HTTP] send ");
#endif
//if (httpServer.begin(httpClient, "http://www.fdt.altervista.org/Z_PitAlarm/PIT_write_logs.php?P1=RVFL/FL01&dato=FL01_inizializzato_correttamente")) { // HTTP
if (httpServer.begin(httpClient, PitAlarmUrl)) { // HTTP
#ifdef OnSerial
Serial.println("ok");
#endif
#ifdef OnPiuDebug
Serial.print("[HTTP] GET...\n");
#endif
// start connection and send HTTP header
int httpCode = httpServer.GET();
// httpCode will be negative on error
if (httpCode > 0) {
// HTTP header has been send and Server response header has been handled
#ifdef OnPiuDebug
Serial.printf("[HTTP] GET... code: %d\n", httpCode);
#endif
// file found at server
if (httpCode == HTTP_CODE_OK || httpCode == HTTP_CODE_MOVED_PERMANENTLY) {
String payload = httpServer.getString();
#ifdef OnPiuDebug
Serial.println(payload);
#endif
}
} else {
Serial.printf("[HTTP] GET... failed, error: %s\n", httpServer.errorToString(httpCode).c_str());
}
httpServer.end();
} else {
Serial.printf("[HTTP} Unable to connect\n");
}
}
#endif
}
#ifdef TimeNTP
#ifdef OnSerial
void PrintDateTime() {
// digital clock display of the time
if (day() < 10)
Serial.print('0');
Serial.print(day());
Serial.print("/");
if (month() < 10)
Serial.print('0');
Serial.print(month());
Serial.print("/");
Serial.print(year());
Serial.print(",");
if (hour() < 10)
Serial.print('0');
Serial.print(hour());
printDigits(minute());
printDigits(second());
Serial.print(",");
}
void printDigits(int digits) {
// utility for digital clock display: prints preceding colon and leading 0
Serial.print(":");
if (digits < 10)
Serial.print('0');
Serial.print(digits);
}
#endif
#endif
#ifdef TimeNTP
/*-------- NTP code ----------*/
const int NTP_PACKET_SIZE = 48; // NTP time is in the first 48 bytes of message
byte packetBuffer[NTP_PACKET_SIZE]; //buffer to hold incoming & outgoing packets
time_t getNtpTime()
{
while (Udp.parsePacket() > 0) ; // discard any previously received packets
#ifdef OnPiuDebug
Serial.print(" Transmit NTP Request ... ");
#endif
sendNTPpacket(timeServer);
uint32_t beginWait = millis();
while (millis() - beginWait < 1500) {
int size = Udp.parsePacket();
if (size >= NTP_PACKET_SIZE) {
#ifdef OnPiuDebug
Serial.println("Receive NTP Response ok");
#endif
Udp.read(packetBuffer, NTP_PACKET_SIZE); // read packet into the buffer
unsigned long secsSince1900;
// convert four bytes starting at location 40 to a long integer
secsSince1900 = (unsigned long)packetBuffer[40] << 24;
secsSince1900 |= (unsigned long)packetBuffer[41] << 16;
secsSince1900 |= (unsigned long)packetBuffer[42] << 8;
secsSince1900 |= (unsigned long)packetBuffer[43];
/*
#ifdef OnPiuDebug
//
// Ivano - calcolo del giorno della settimana - per ora legale
//
Serial.print("Seconds since Jan 1 1900 = ");
Serial.println(secsSince1900);
// now convert NTP time into everyday time:
Serial.print("Unix time = ");
// Unix time starts on Jan 1 1970. In seconds, that's 2208988800:
const unsigned long seventyYears = 2208988800UL;
// subtract seventy years:
unsigned long epoch = secsSince1900 - seventyYears;
// print Unix time:
Serial.println(epoch);
// https://forum.arduino.cc/index.php?topic=120325.0
// https://stackoverflow.com/questions/36389130/how-to-calculate-the-day-of-the-week-based-on-unix-time
//
int day_of_the_week = ((epoch / 86400L) + 4) % 7;
Serial.print("Day of week = ");
Serial.println(day_of_the_week);
#endif
*/
return secsSince1900 - 2208988800UL + timeZone * SECS_PER_HOUR;
}
}
#ifdef OnPiuDebug
Serial.println("No NTP Response :-(");
#endif
return 0; // return 0 if unable to get the time
}
// send an NTP request to the time server at the given address
void sendNTPpacket(IPAddress &address)
{
// set all bytes in the buffer to 0
memset(packetBuffer, 0, NTP_PACKET_SIZE);
// Initialize values needed to form NTP request
// (see URL above for details on the packets)
packetBuffer[0] = 0b11100011; // LI, Version, Mode
packetBuffer[1] = 0; // Stratum, or type of clock
packetBuffer[2] = 6; // Polling Interval
packetBuffer[3] = 0xEC; // Peer Clock Precision
// 8 bytes of zero for Root Delay & Root Dispersion
packetBuffer[12] = 49;
packetBuffer[13] = 0x4E;
packetBuffer[14] = 49;
packetBuffer[15] = 52;
// all NTP fields have been given values, now
// you can send a packet requesting a timestamp:
Udp.beginPacket(address, 123); //NTP requests are to port 123
Udp.write(packetBuffer, NTP_PACKET_SIZE);
Udp.endPacket();
}
#endif
Codice sorgente sul sito:
";
echo "dato : " . $_GET["dato"] . "
";
echo "-----------------" . "
";
$pitSta = $_GET["P1"];
echo "pitSta : " . $pitSta . "
";
$pitDat = date("Ymd");
echo "pitDat : " . $pitDat . "
";
$pitTim = date("H:i:s");
echo "pitTim : " . $pitTim . "
";
$pitExt = substr ($_GET["P1"] , $pos3 );
$dto = $_GET["dato"];
echo "dto : " . $dto . "
";
if ($debug)
{
//
// dummy file for debug
//
//$fdmm = str_replace(".txt", ".tmp" , $_GET["P1"]);
$fdmm = "tmp/" . $pitSta . $pitDat . ".tmp";
$myfdmm = fopen($fdmm , 'a');
$txt = "-----------------------" . "\r\n";
$txt .= "Parametri passati" . "\r\n";
$txt .= date("d/m/Y") . "," . date("H:i:s") . "\r\n";
$txt .= "-----------------------" . "\r\n\r\n";
$txt .= "P1 = " . $_GET["P1"] . "\r\n";
$txt .= "dato = " . $_GET["dato"] . "\r\n";
$txt .= "Time = " . $_GET["Time"] . "\r\n\r\n";
$txt .= "-----------------------" . "\r\n\r\n";
fwrite($myfdmm, $txt);
}
//
// analisi di dato
//
/*
$dto = $_GET["dato"];
$posCTR = strpos($dto, " ");
echo "posCTR : " . $posCTR . "
";
if ($posCTR !== false){
$pitTip = substr ($dto , 0, $posCTR);
$dto = substr ($dto , $posCTR+1);
}
else {
$pitTip = "dati";
}
echo "pitTip : " . $pitTip . "
";
echo "dto : " . $dto . "
";
*/
//
if ($debug)
{
$txt = "P1 = " . $_GET["P1"] . "\r\npos1 = " . $pos1 . "\r\npos2 = " . $pos2 . "\r\npitDir = " . $pitDir . "\r\npitSta = " . $pitSta . "\r\npitDat = " . $pitDat . "\r\npitExt = " . $pitExt . "\r\n";
$txt .= "dato = " . $_GET["dato"] . "\r\ntipodato = " . $pitTip . "\r\npos = " . $pos . "\r\nfdato1 = " . $dato1 . "\r\nfdato2 = " . $dato2 . "\r\nfdato3 = " . $dato3 . "\r\n\r\n";
fwrite($myfdmm, $txt);
}
//
// creazione del file csv
//
$fgch = $pitSta . "_" . $pitDat . ".csv";
$fgcp = $pitSta . ".txt";
//
echo "csv : " . $fgch . "
";
echo "txt : " . $fgcp . "
";
echo "-----------------" . "
";
$myfile = fopen($fgch, 'a');
//
$txt = date("d/m/Y") . "," . $pitTim . "," . $dto . "\r" ; // \n";
fwrite($myfile, $txt);
fclose($myfile);
copy($fgch,$fgcp);
?>
Cosa serve:
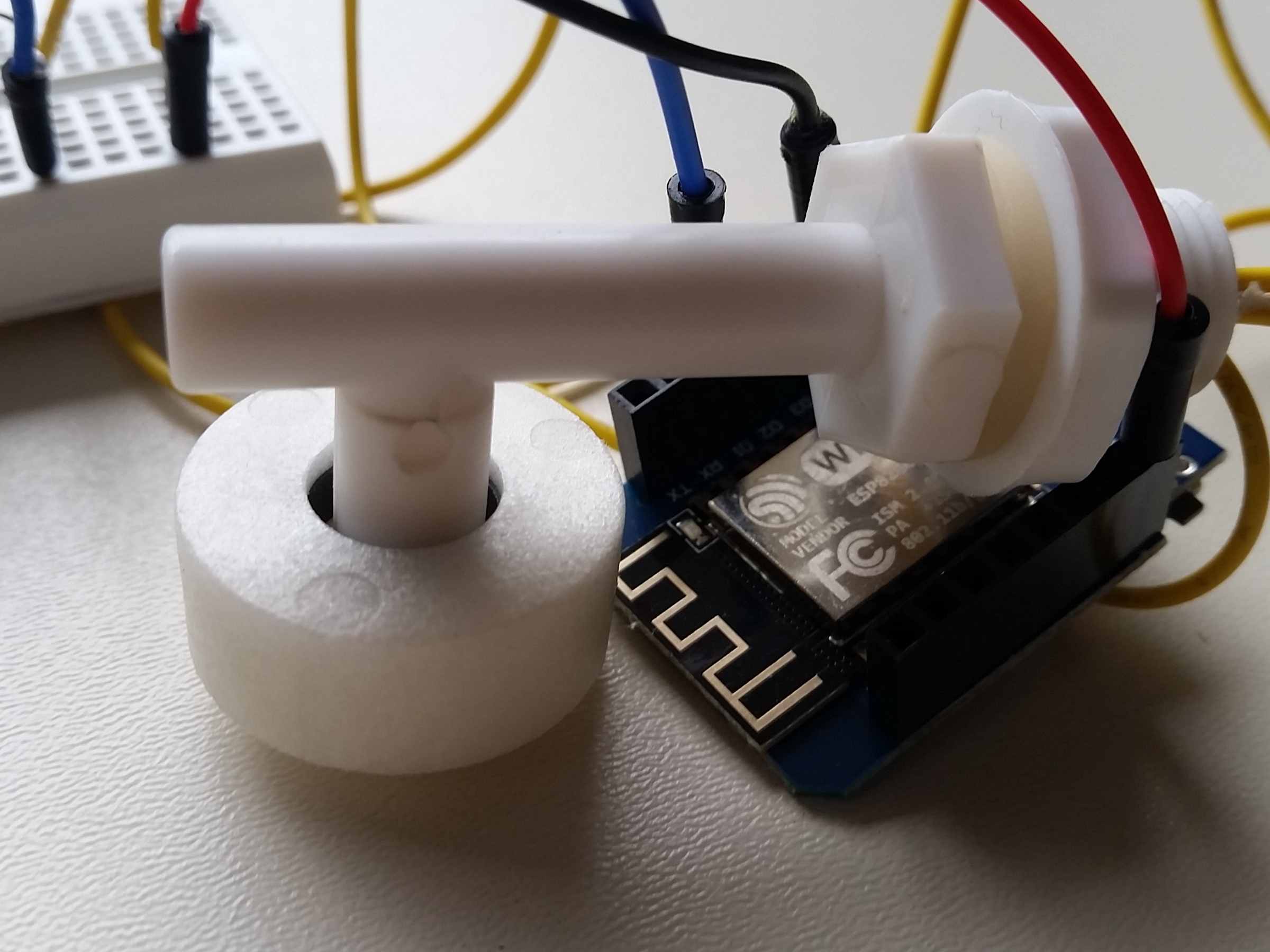
- ESp8266 - ESP-12d1 mini
- Sensore reed di livello H2O
- Sensore contatto reed
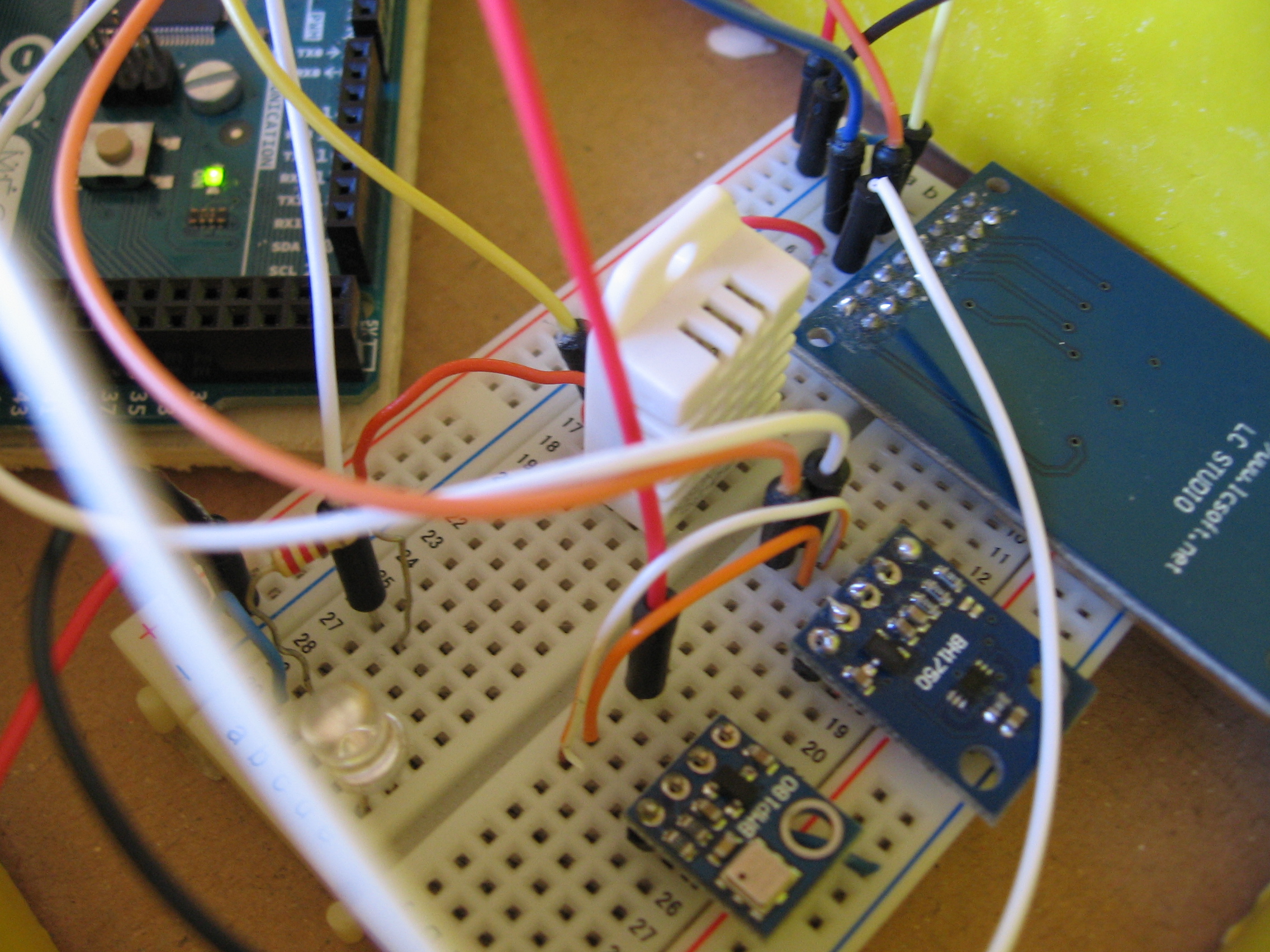
- Sensore presenza di h2o senza contatto
- Sensore MQ
- RELE
- Resistenza da 10kOhm
- cavetti